Crab Controller & Crab Simulator
A 3D-printed posable crab input joystick with 4 legs and 3 DOF per leg for controlling tetrapod walkers and simulations in real time via Arduino Mega and Standard Firmata.
Overview
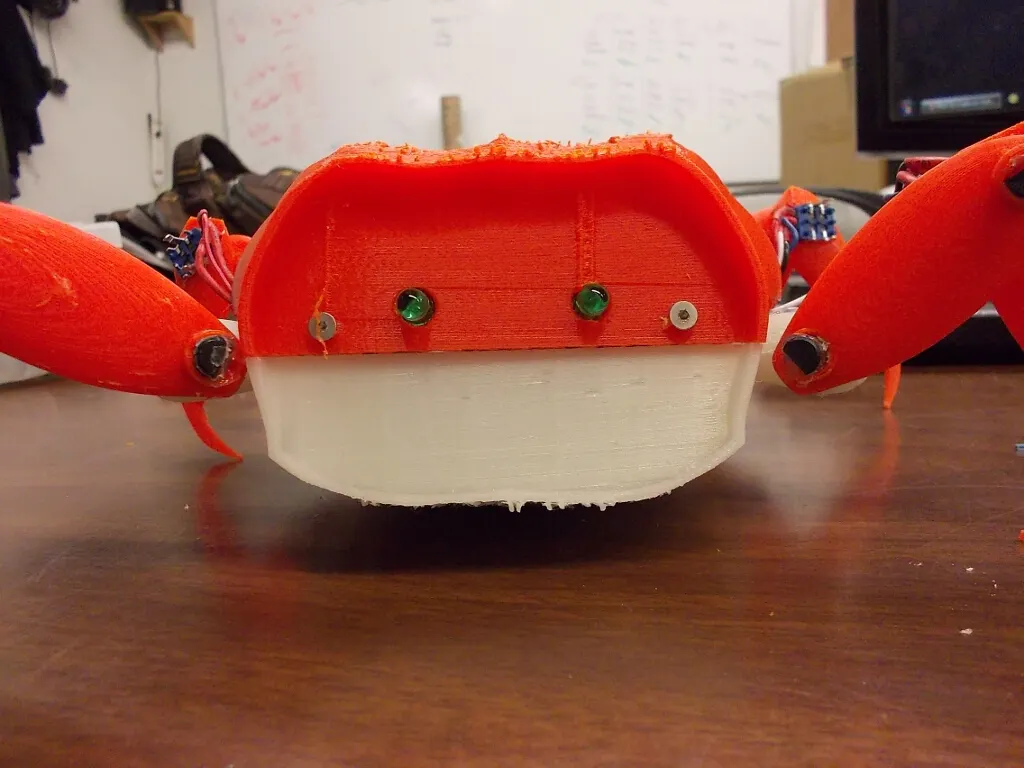
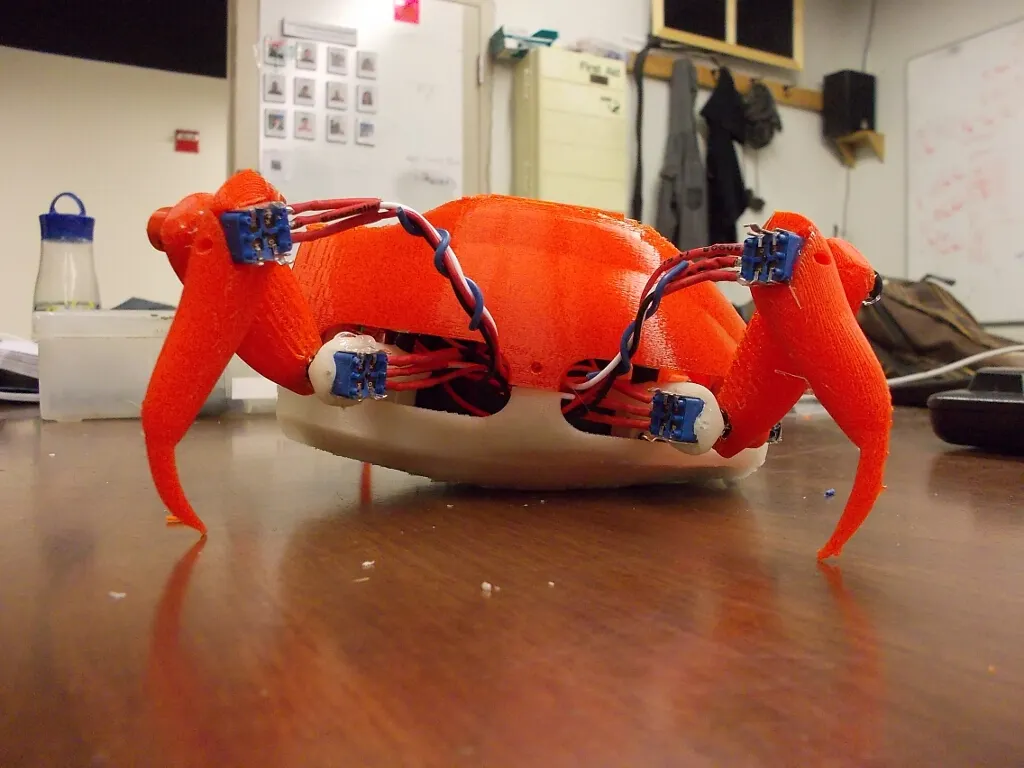
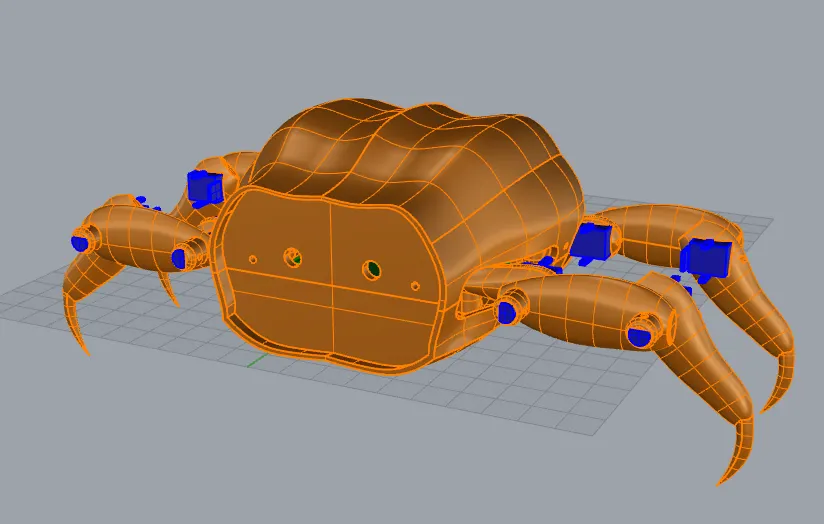
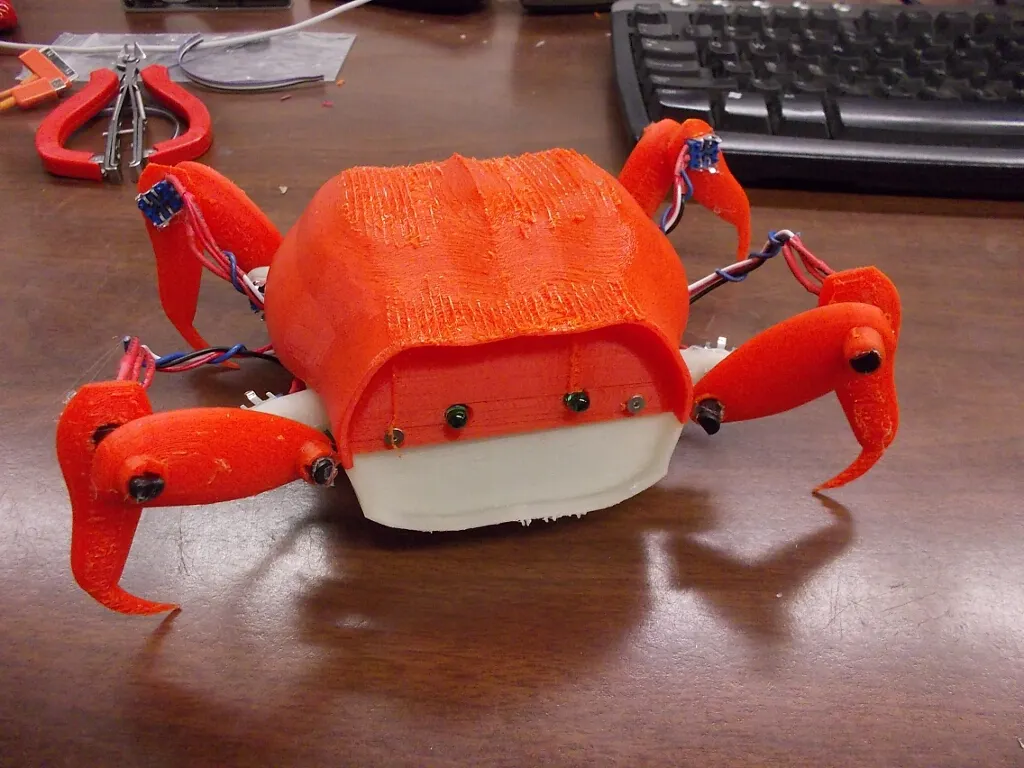
A 3D-printed, posable crab input joystick for controlling tetrapod walkers, motion capture, and simulations. With 4 legs and 3 degrees of freedom per leg, the Crab Controller sends real-time joint data through an Arduino Mega via the Standard Firmata protocol to a connected device.
Here, the crab controller is used to control an underwater virtual crab simulator in real time — move the physical crab’s legs, and the virtual crab follows.
Built for Interactive Art and Computational Design at Carnegie Mellon University, Spring 2015.
Key Features
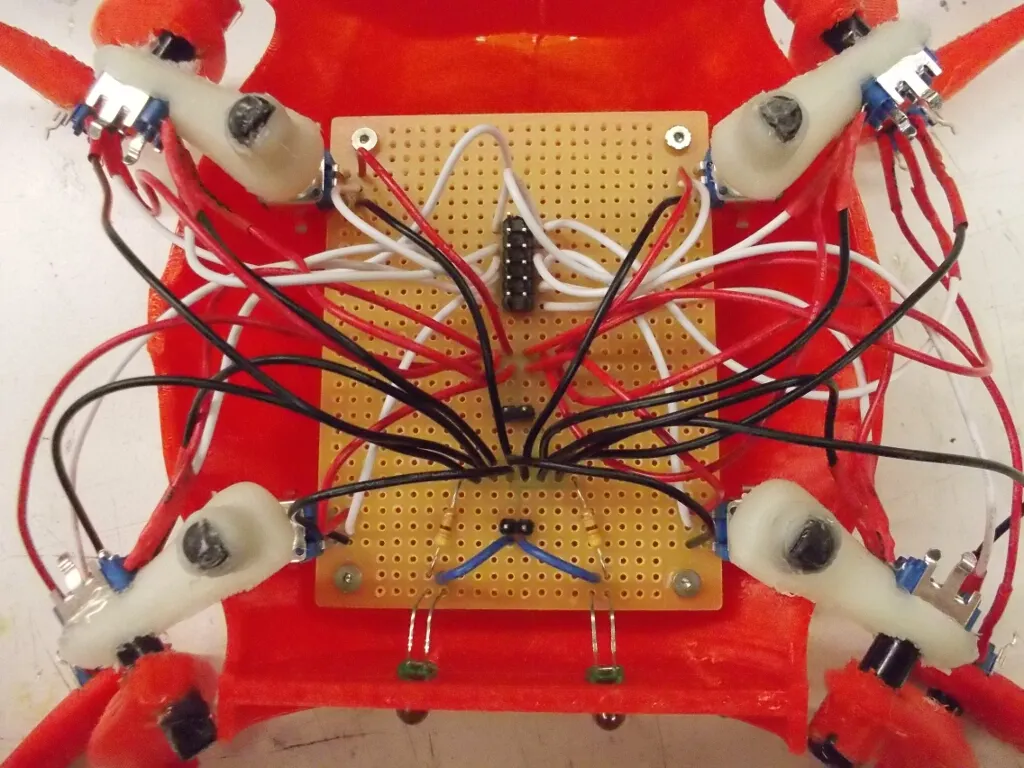
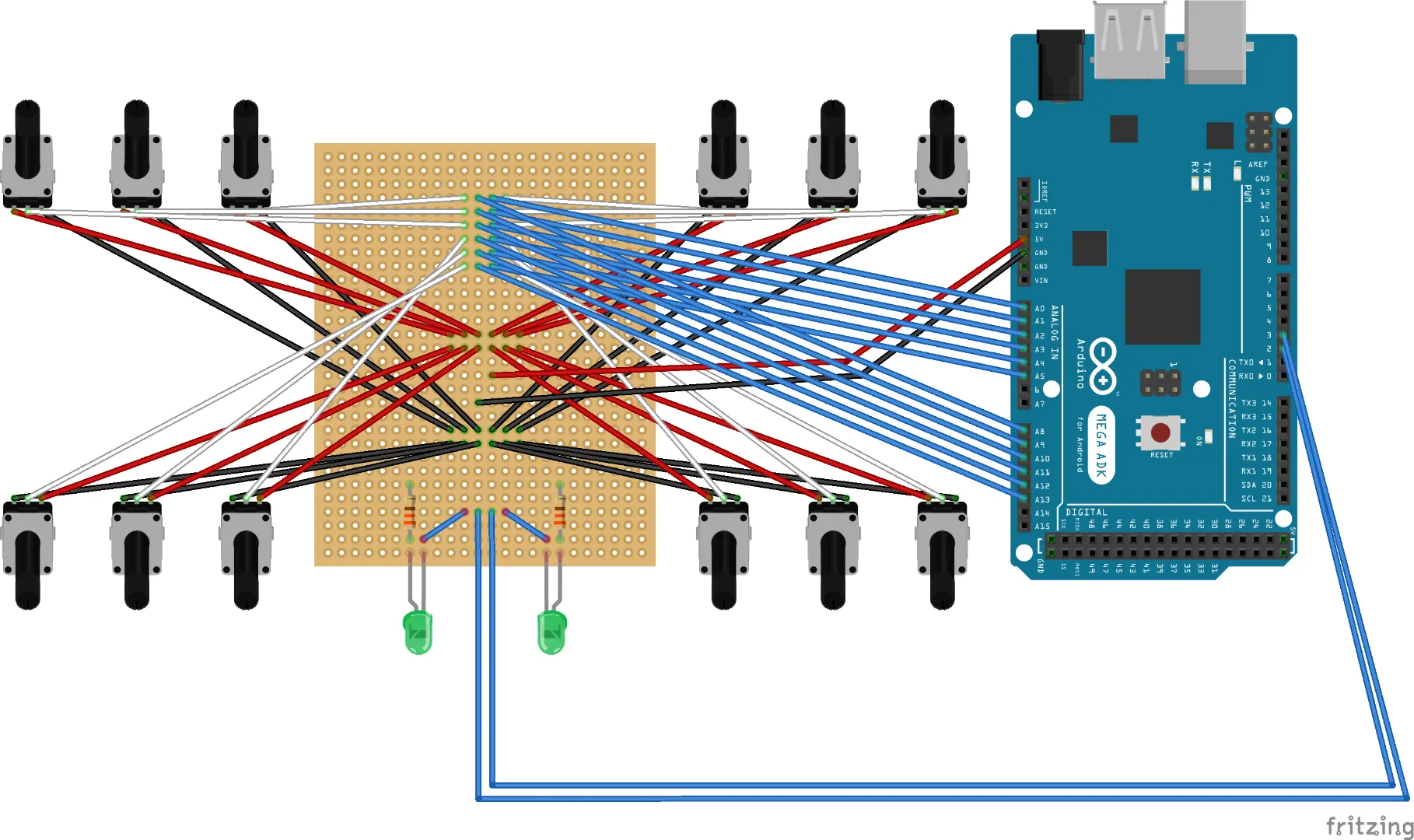
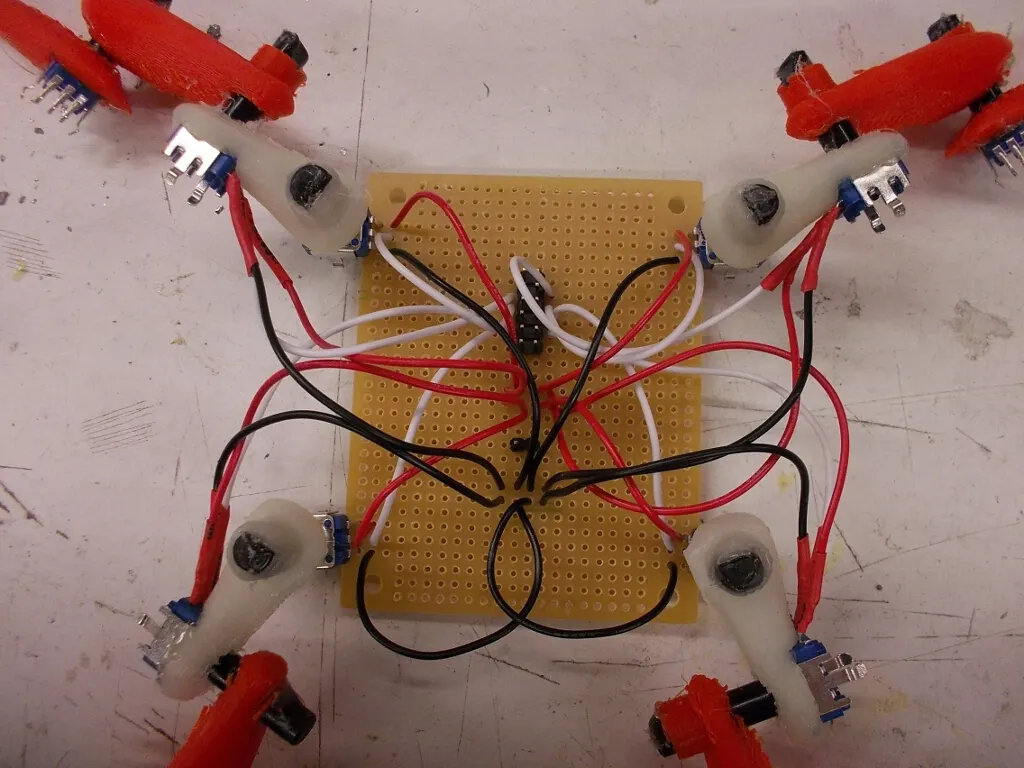
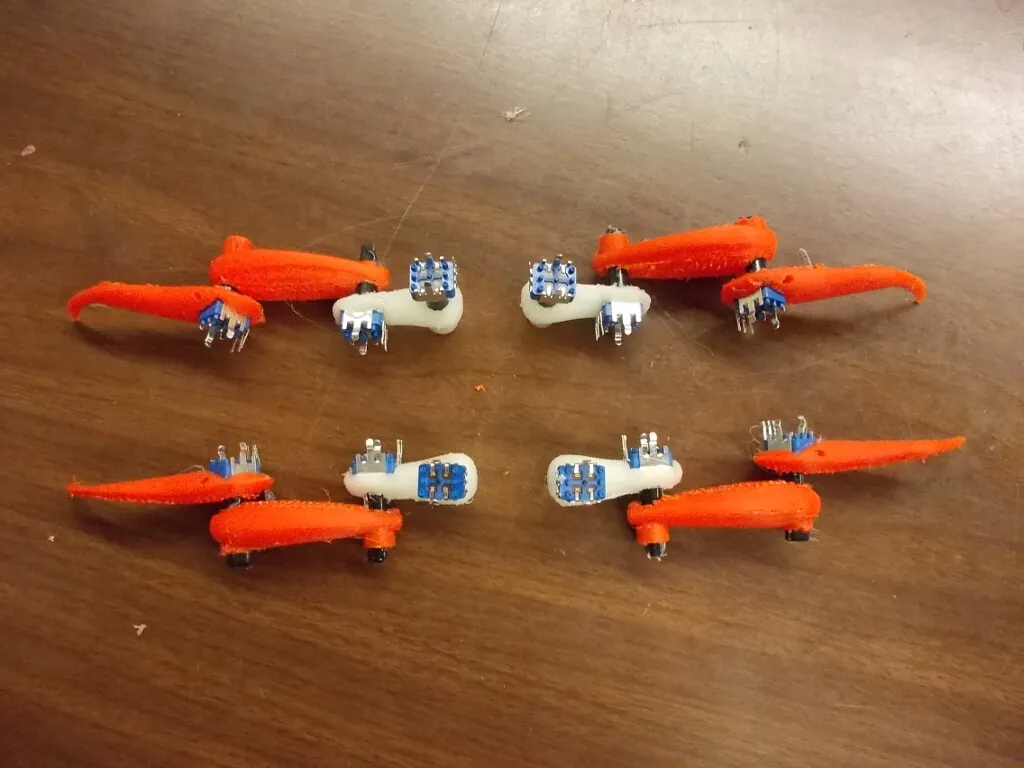
- 4 legs × 3 DOF = 12 independent servo-driven joints
- Real-time pose data streamed via Standard Firmata over USB
- Paired virtual crab simulator for real-time visual feedback
- Applicable to tetrapod robot control, motion capture, and gait research
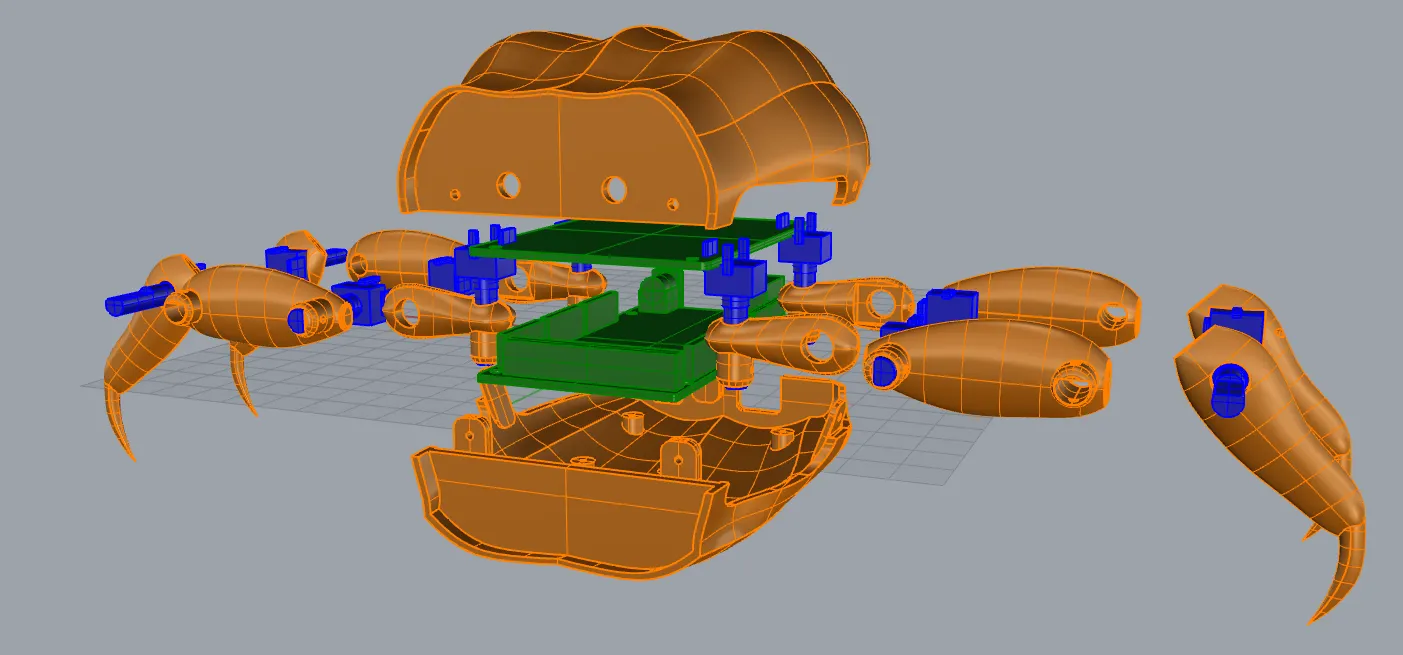
- Fully 3D-printed articulated body
Gallery