HERB Puppet
A posable, 3D-printed seven-jointed puppet controller designed to interface with CMU Personal Robotics Lab's HERB robot for dramatic performances. Built as a "voodoo doll" that maps the puppet's joint states directly onto the full-size robot.
Overview
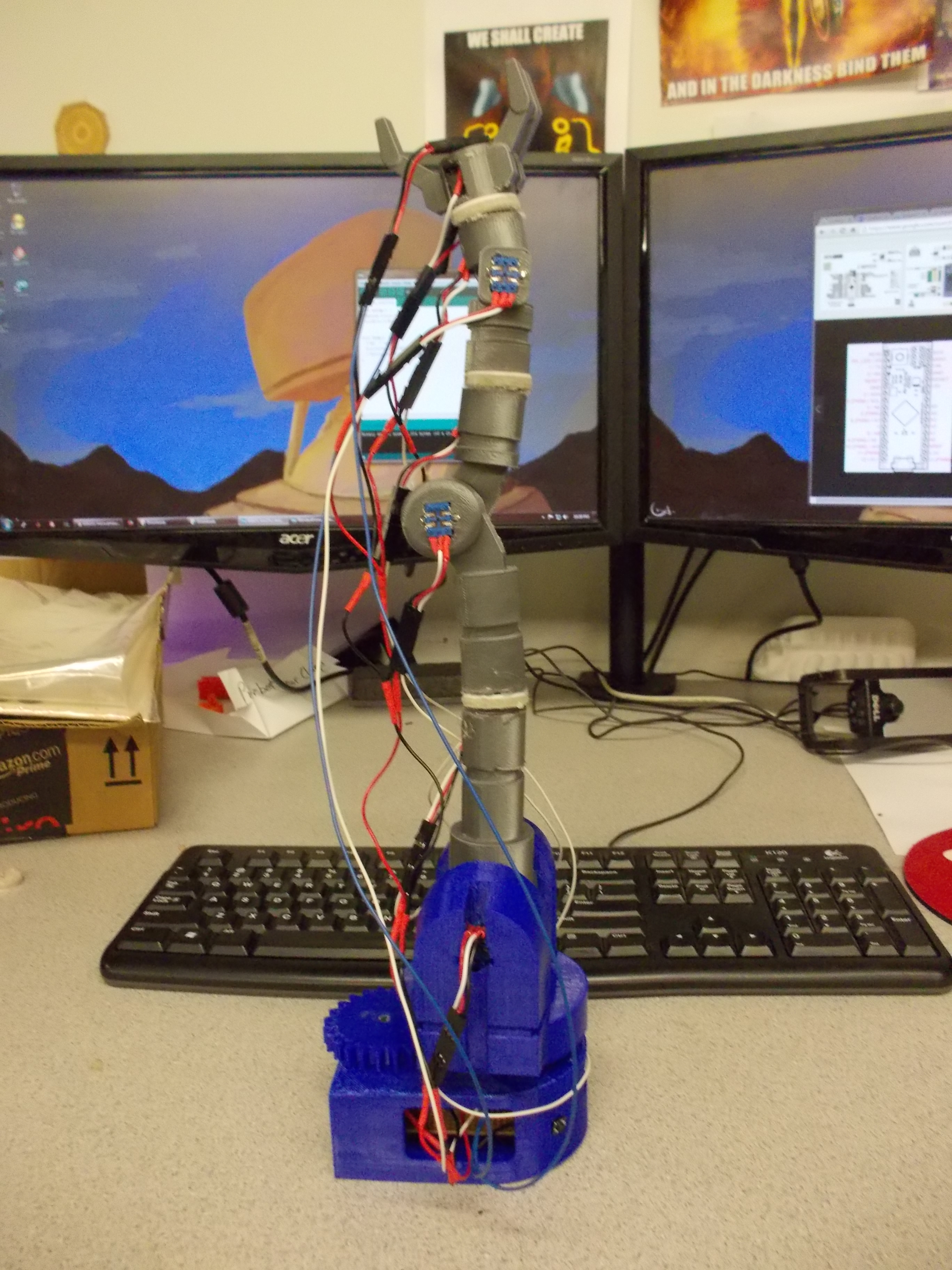
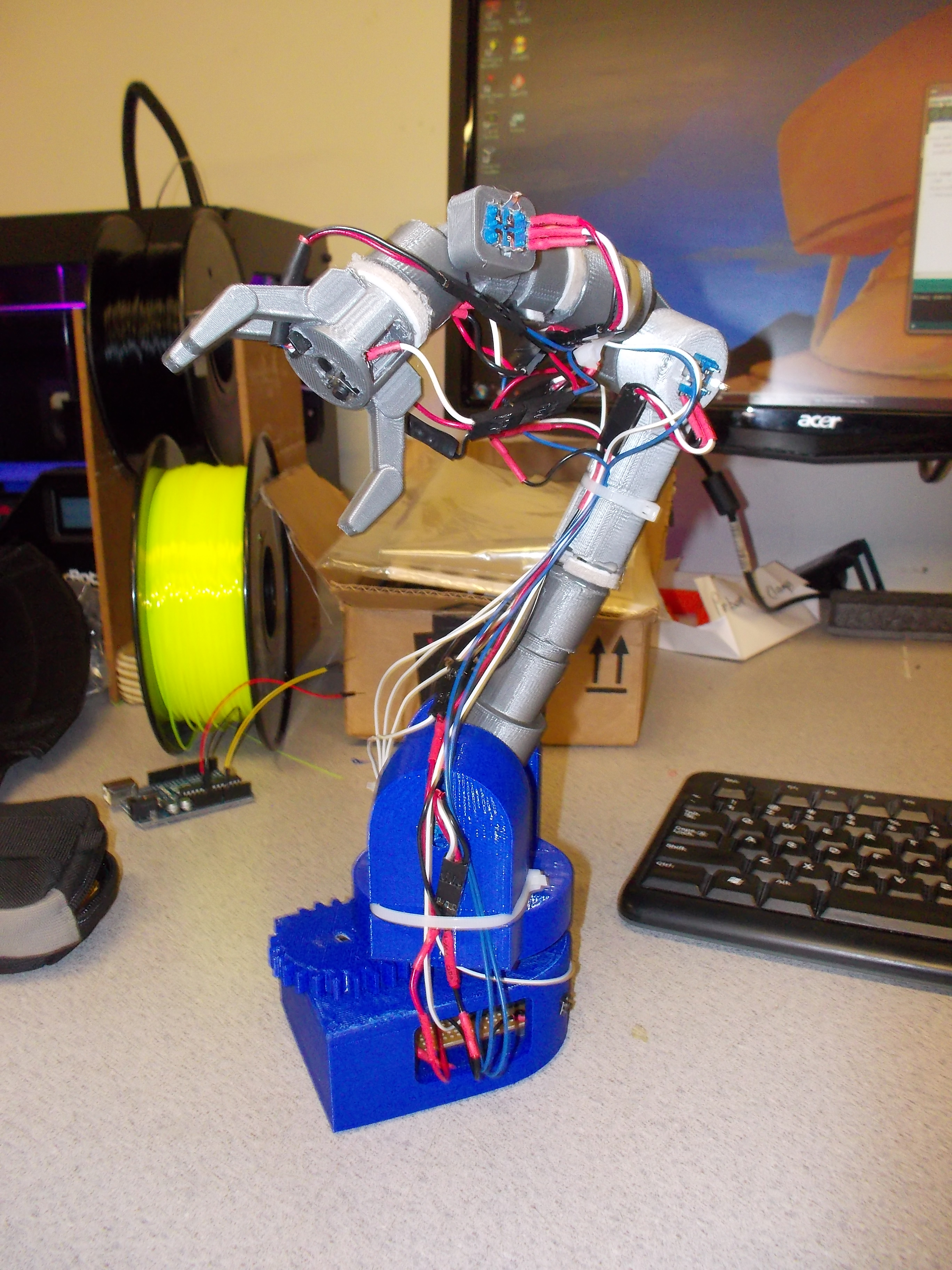
The HERB Puppet is a posable, 3D-printed, seven-jointed controller designed to interface with the Personal Robotics Lab’s HERB (Home Exploring Robotic Butler) for use in dramatic performances. Built as part of an independent study (60-499) at Carnegie Mellon University, Fall 2015.
The concept: a scaled-down “voodoo doll” of HERB that a puppeteer could physically pose to control the joint states of the full-size robot in real time — making HERB dramatically easier and more intuitive to control for live performance.
Development
The project grew out of conversations with faculty and students at the Personal Robotics Laboratory over the summer about how to make HERB more interactive and expressive. A physical puppet controller was identified as the ideal solution.
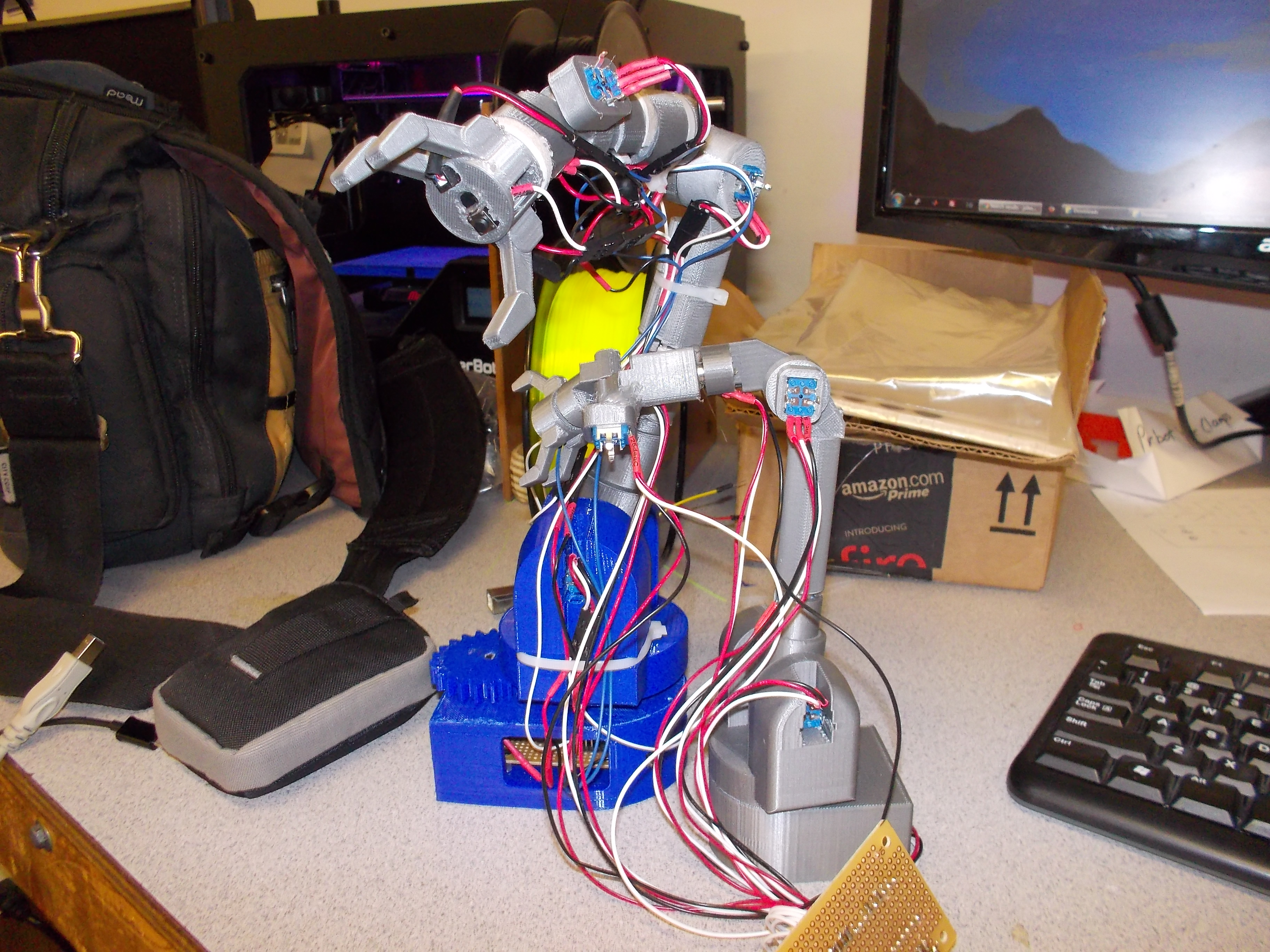
Revision 1 — built over summer break; functional proof of concept.
Revision 2 — implemented in Fall 2015 with several improvements:
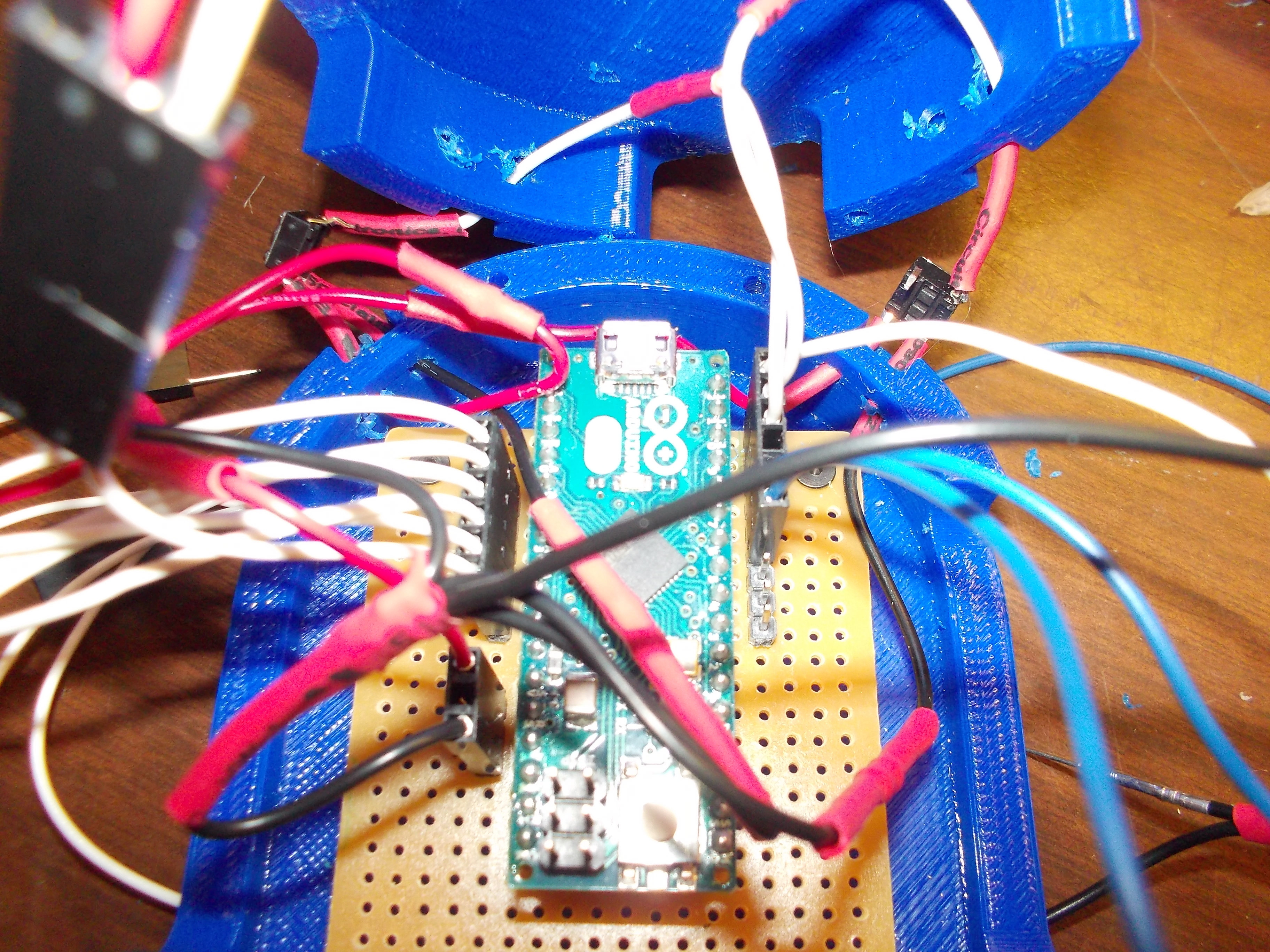
- Superior wire routing
- Slightly larger form factor
- Added buttons
- Servo pigtail connectors
Planned future improvements:
- Even stronger wire routing
- Higher-durability potentiometers
- Stronger friction pads for pose-holding
- Potentially larger scale
Affiliation
- CMU Personal Robotics Lab — home of HERB, a bimanual mobile manipulator designed for human-robot interaction in everyday environments
- Carnegie Mellon University — 60-499 Independent Study
Gallery