KineMech
A laser-cut humanoid robot that copies your body movements in real time using a Kinect sensor — built in 36 hours at a CMU Hackathon, where it won first place.
Overview
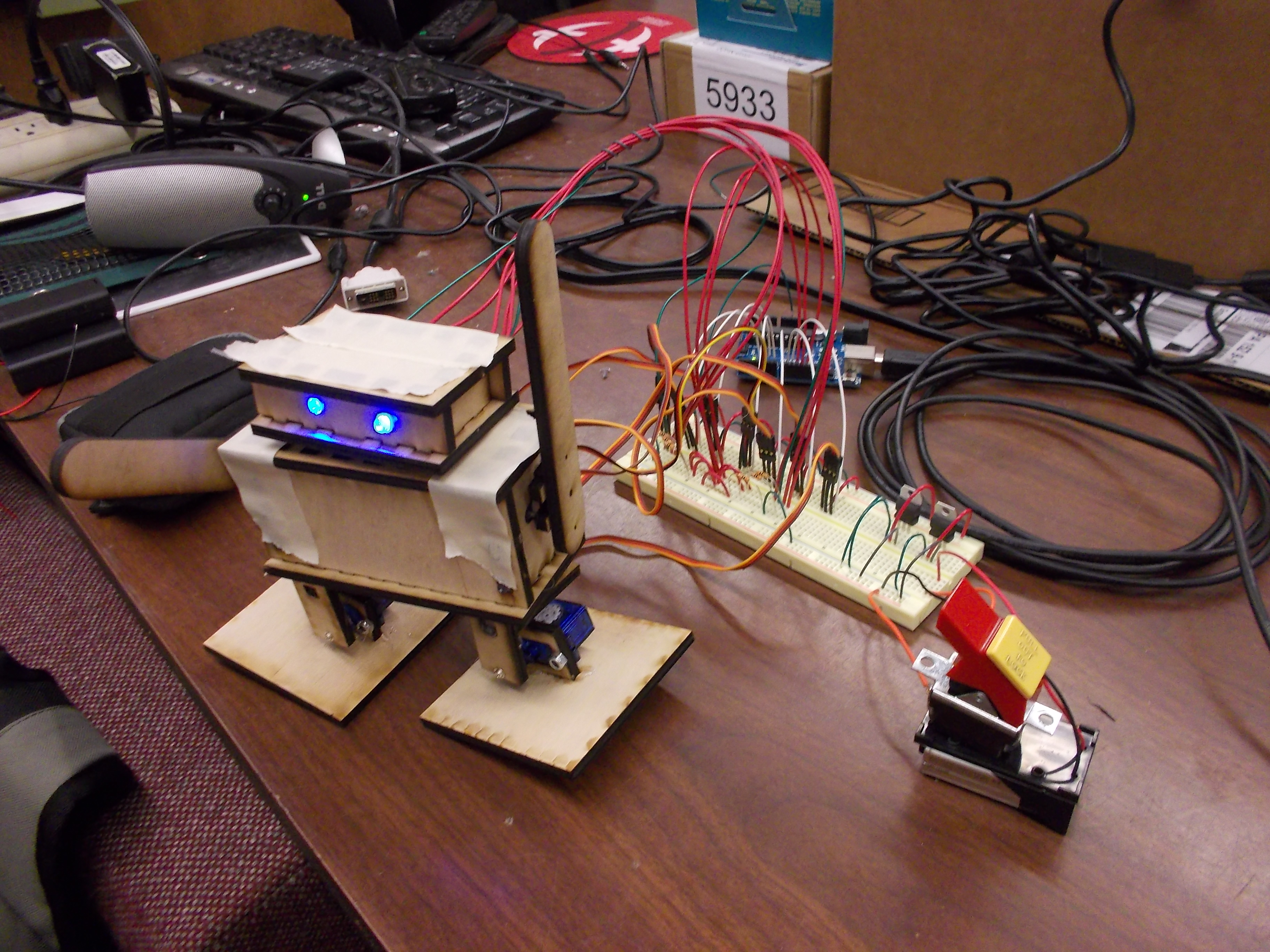
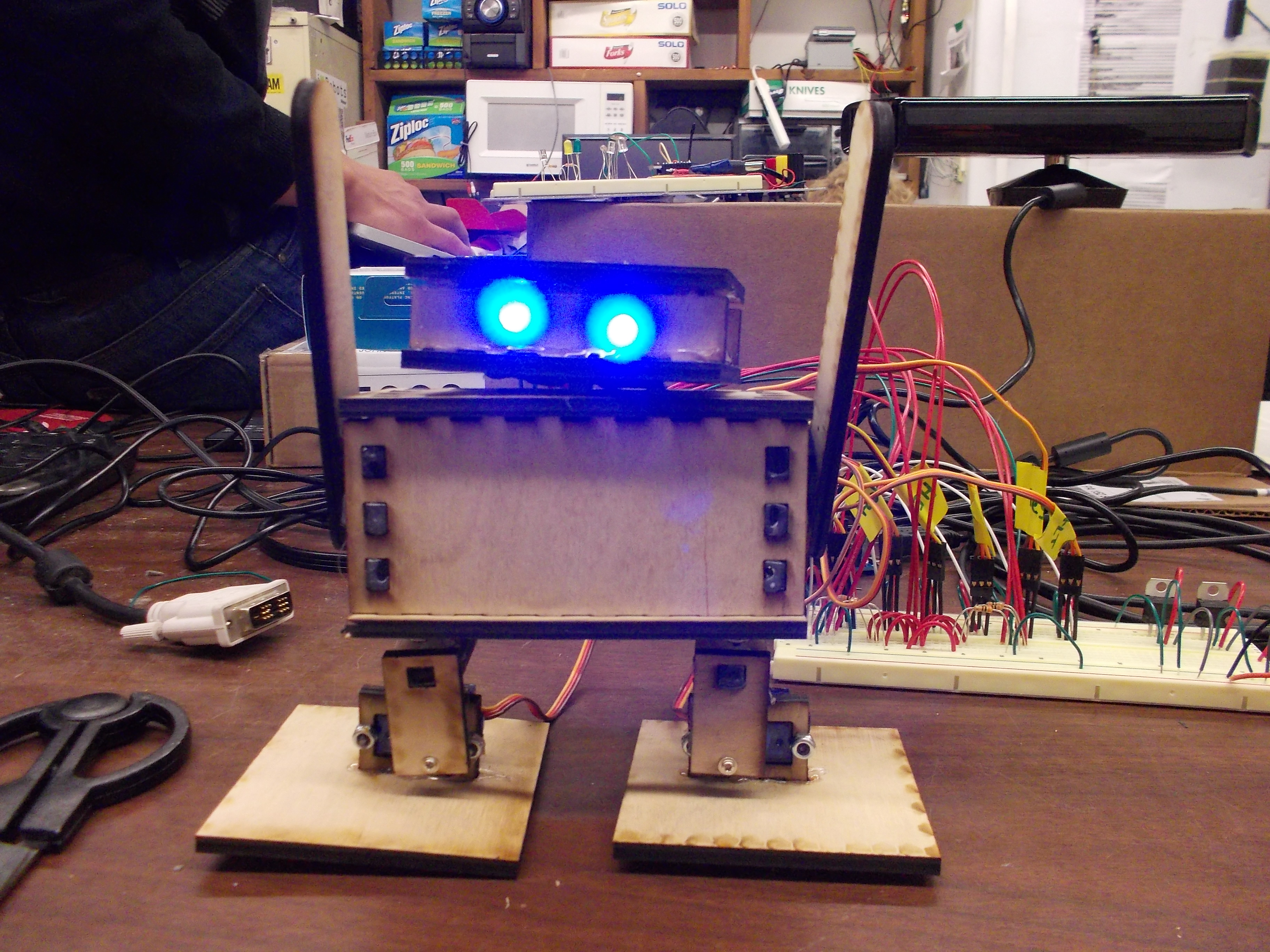
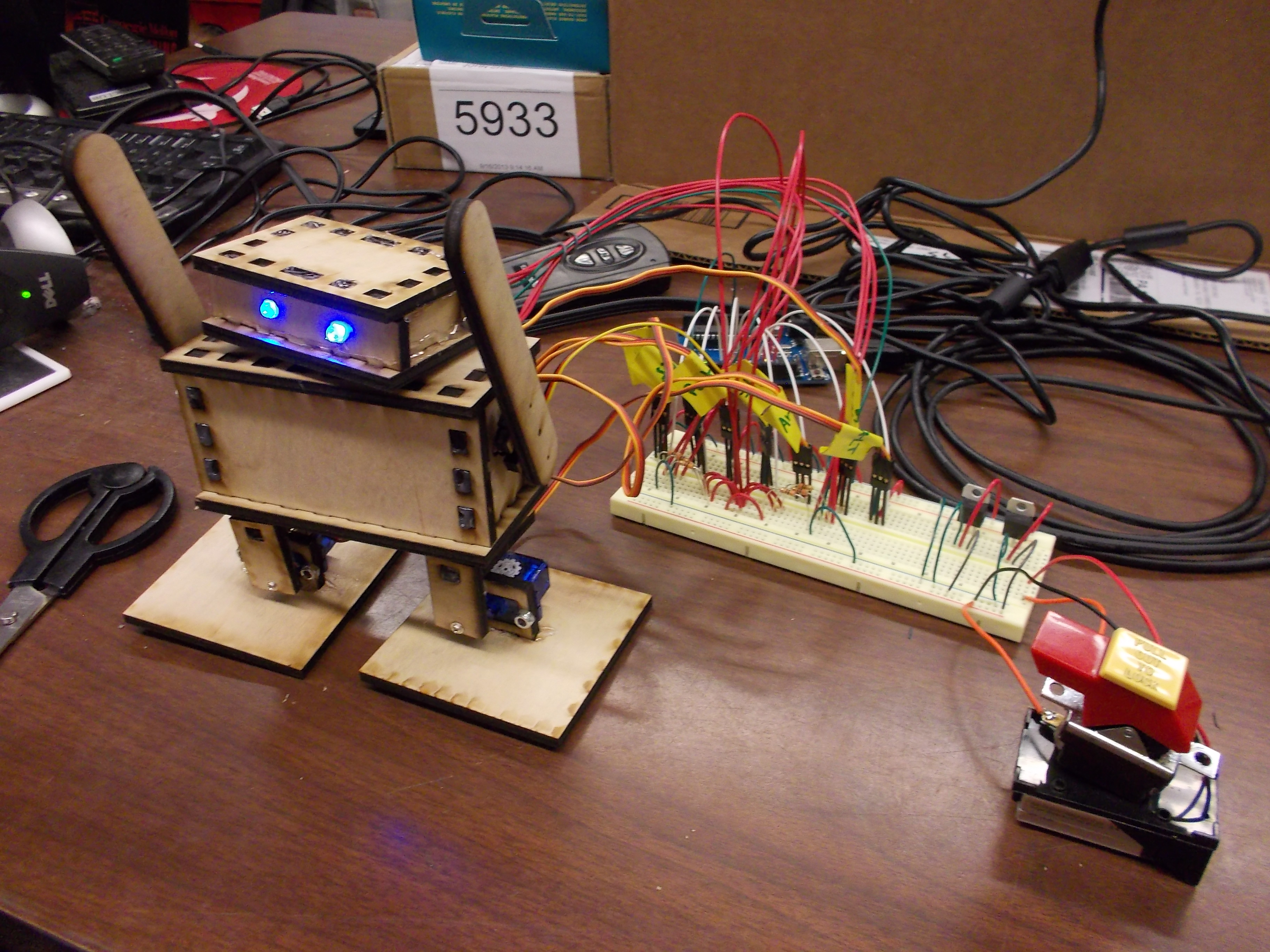
KineMech is a laser-cut humanoid robot that observes and imitates a human’s body movements in real time using a Microsoft Kinect sensor. The robot rotates its 7 servo motors to approximate the user’s actual body pose — mirroring your arms, torso, and head with no controllers required.
Built in just 36 hours over two days for a Hackathon at Carnegie Mellon University — and took first place.
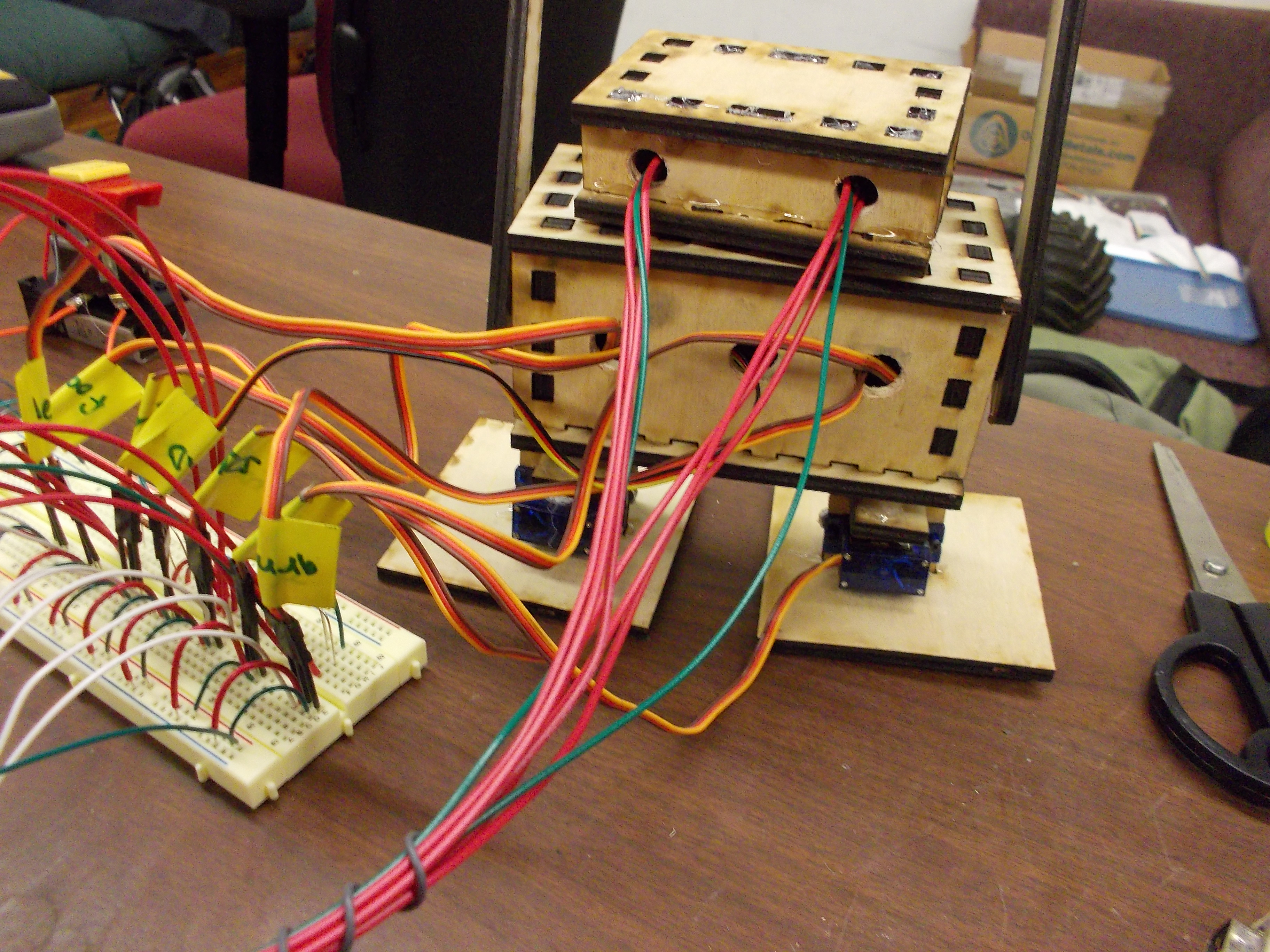
Hardware
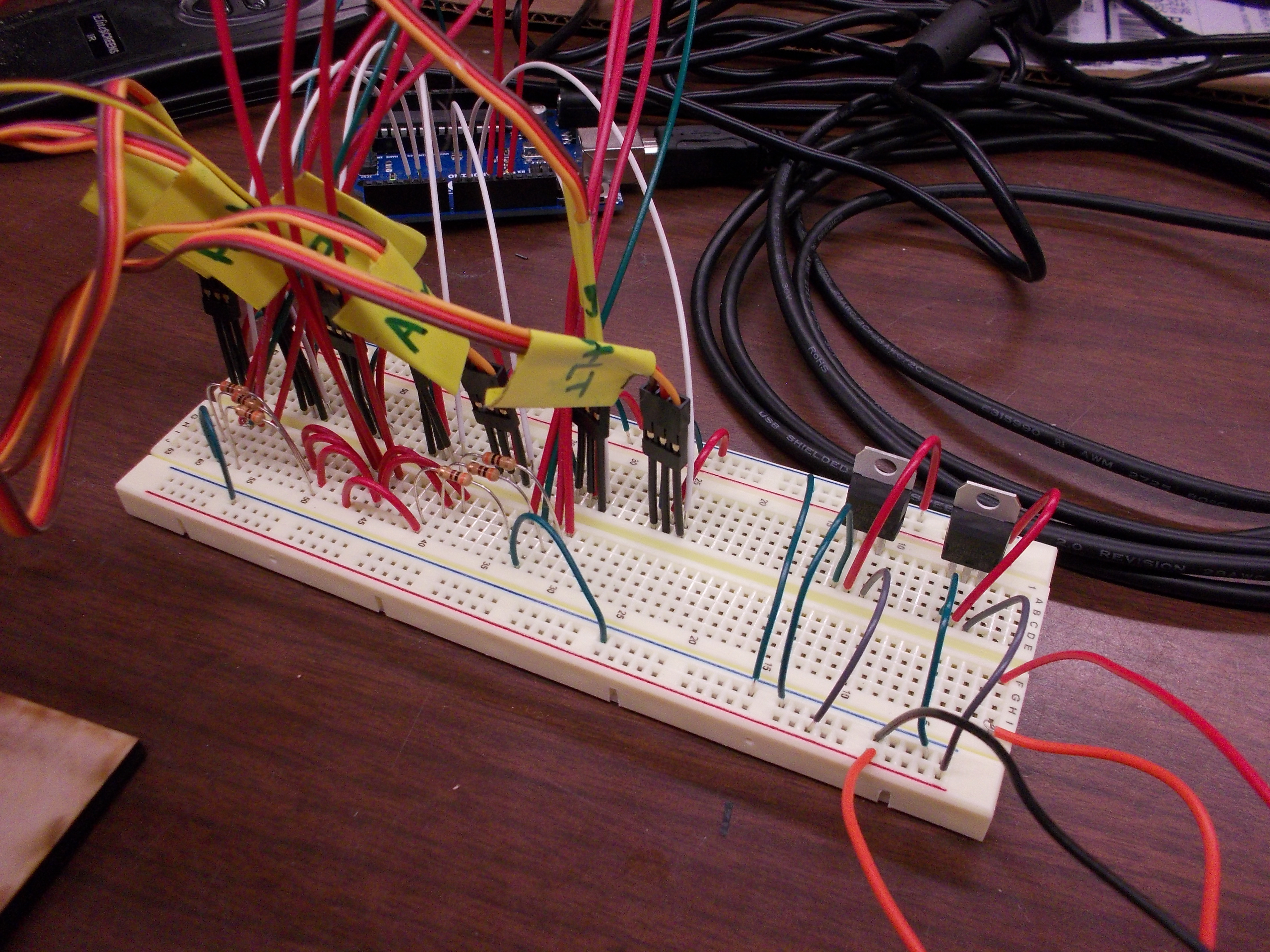
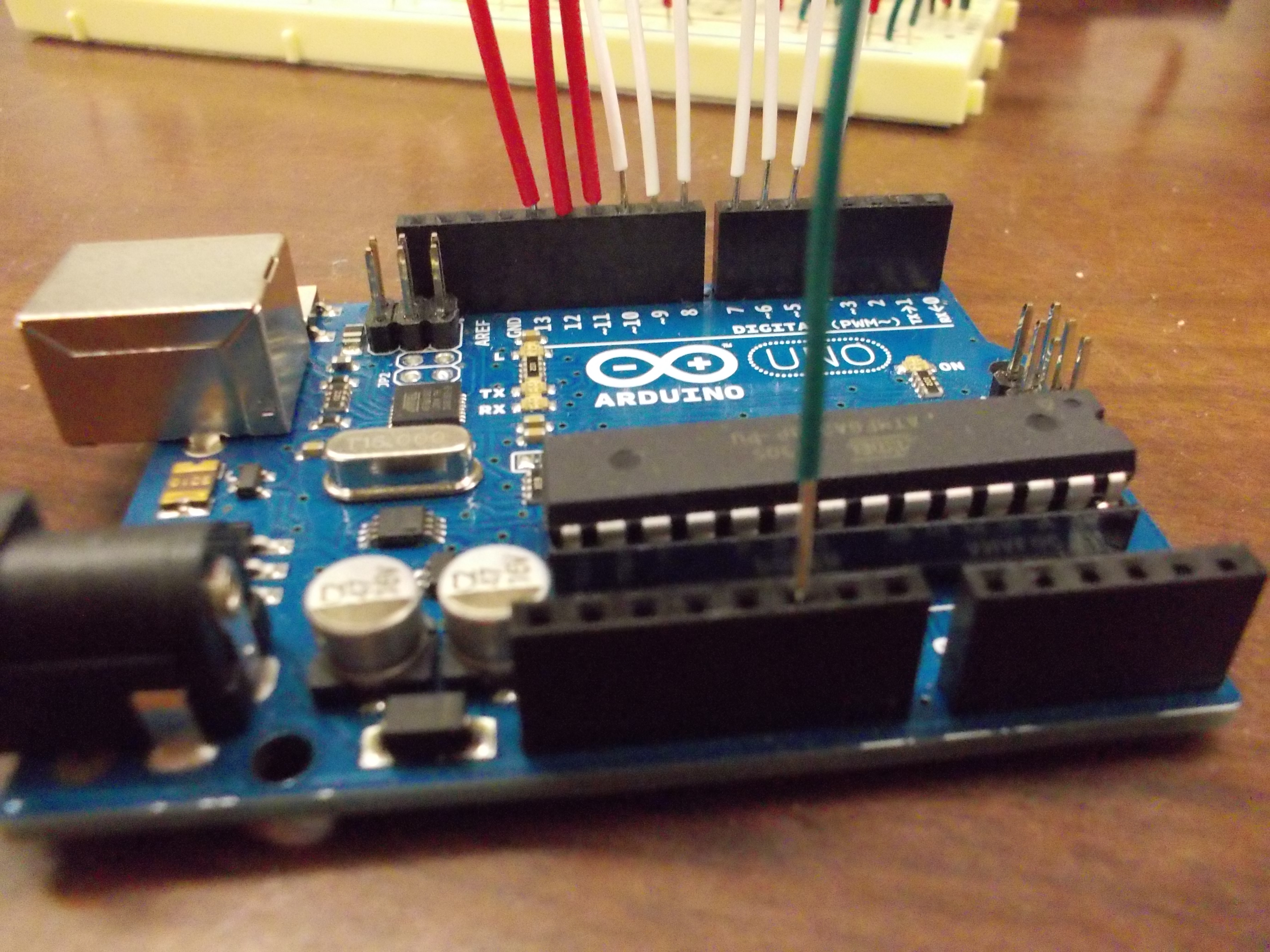
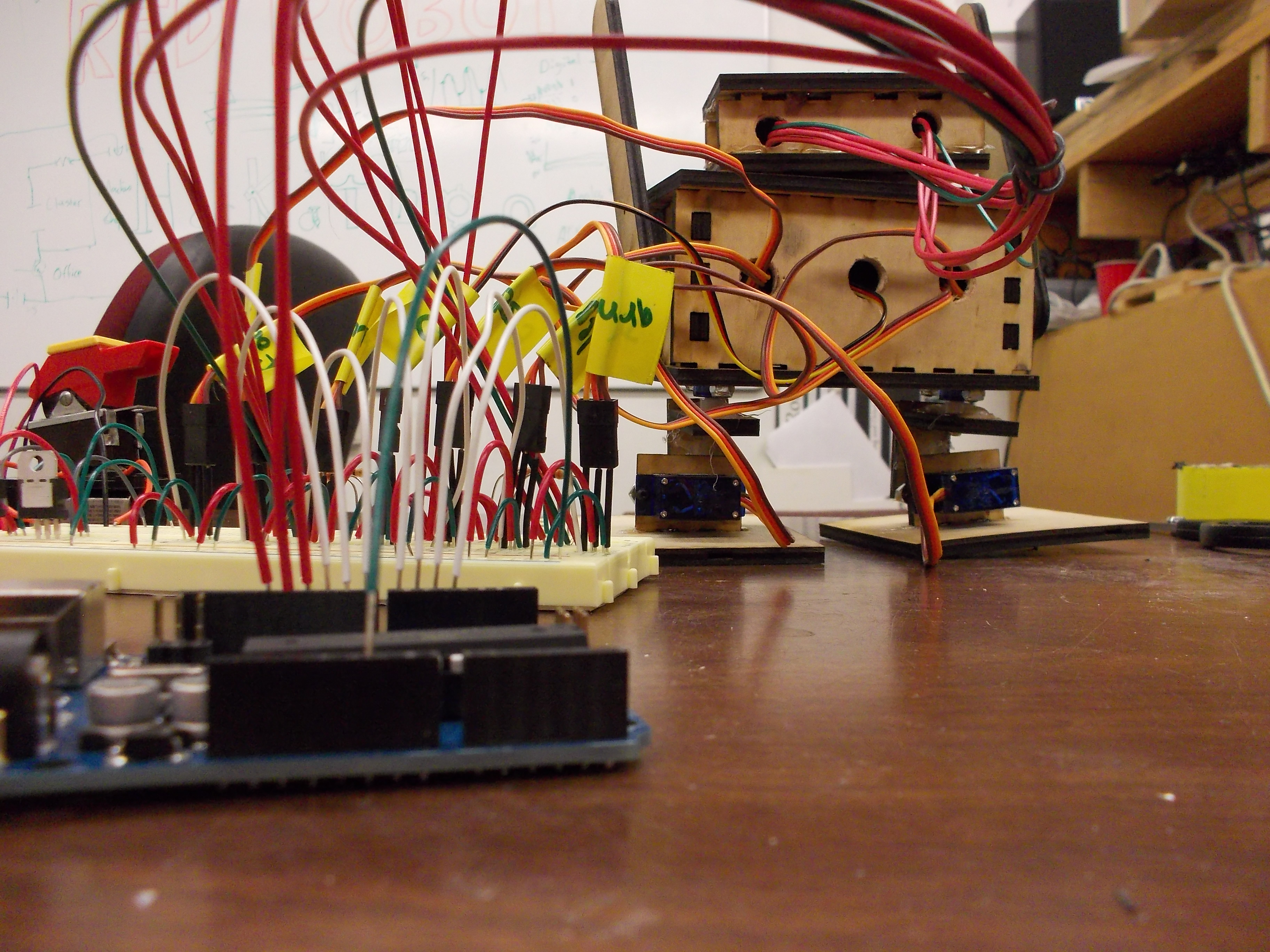
- Arduino microcontroller
- 7 Micro Servos
- Microsoft Kinect
- Laser-cut wood chassis
- Voltage reducers (9V to 3.3V)
- 2 Tricolor LEDs
- Breadboard + wiring
- 9V battery
Software
- Unity + Uniduino — real-time servo control bridge
- OpenNI — Kinect skeleton tracking
- Arduino — servo firmware
- Autodesk Inventor — structural design
- Autodesk Maya — 3D modeling
Credits
- Luke Yount — Co-builder
- John Choi — Co-builder
Gallery