Little Kinematic Owl
A 3D-printed kinematic owl with 2 degrees of freedom — rubber-band-driven neck and eyelids powered by two micro servos and an Arduino. Built for CMU 60-210.
Overview
A small kinematic artwork of an owl with 2 degrees of freedom — neck rotation and eyelid blink. Built as an experiment in using rubber bands attached to servo motors as a method of creating soft, compliant actuation systems.
Designed entirely in Rhinoceros 3D, 3D printed in 13 pieces (9 hours of print time), and assembled by hand. The code makes the owl randomly blink and tilt its head, resulting in a curious, sleepy-looking owl.
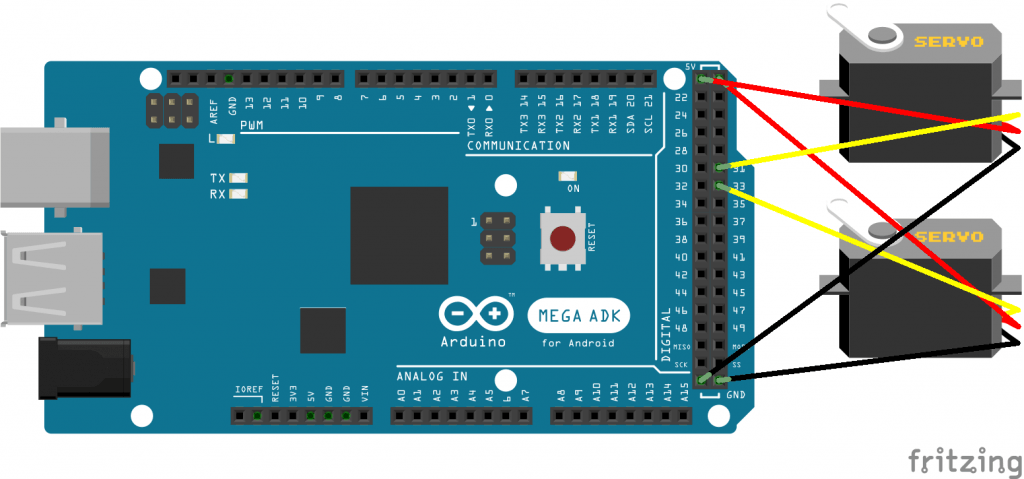
Hardware
- 4 small rubber bands
- 3D printed parts (13 pieces, designed in Rhino3D)
- 2 micro servos (neck + eyelids)
- Arduino
- Screws & wires
Software
- Arduino IDE
- MakerWare
- Rhino3D
Key Findings
Rubber bands attached to servo motors can indeed be used to generate compliant actuation — the eyelids worked very well, and the neck achieved a good range of motion. The random behavior loop gives the owl a personality: energetically tired, sleepy, curious, and oblivious.
Inspiration
Inspired by a USB owl created by an unknown Japanese company — without ever seeing its internal mechanisms, the entire design and actuation system was built from scratch.
Gallery
.png)
.png)